2025國際機器人大會正在北京舉辦,在現場,記者看到了一系列環繞具身智能大腦的立異使用。
聰明具身大腦助力機器人“心靈手巧”
總臺央視記者 張春玲:咱們知道機器人需求有一個聰明的大腦,才能夠去履行各式各樣的使命。現在這個機器人就在進行一個使命——撿廢物。廢物的形狀、質地是徹底不相同的,而這樣的一種場景的演示,其實為咱們展現了機器人的具身大腦在履行一個操作的時分,它關于廢物辨認的一種泛化的才能。
機器人是不是精干活兒,取決于它是不是有一個聰明的具身大腦,能夠完結對作業使命和履行動作的了解。事實上,它像咱們人類相同,在學習的時分會搜集各種實在作業場景的各類數據信息進行練習,經過具身大模型剖析處理后再做出相應的動作。和傳統自動化機器人只具有單一功用不同,具身智能機器人能夠像咱們人類相同,完結不同的使命,除了撿拾廢物,這個機器人還現場表演起了制作香囊和完結繞線等柔性作業。

參展商 楊倩:它要習慣物理空間的各種改變,它要有空間感知,梵高同性戀要能知道什么叫沖突,什么叫重力。一起它跟數據的結合愈加地嚴密,也就是說模型數據和硬件未來都是三位一體去做相應的迭代。
感知晉級 靈活手技能加快迭代
國際機器人大會不只展現了形狀豐厚的機器人整機產品,也展現了供應鏈和要害零部件的技能打破和趨勢。
總臺央視記者 張春玲:這是這次展會上露臉的一個全新的觸覺模型,咱們能夠看到當這個機器手抓握起一個物品的時分,它只需求輕輕地抓握三次,就能夠在這邊實時生成這個物品的空間形狀,而這樣的一個數據能夠更好地協助機器人了解實在的物理國際。
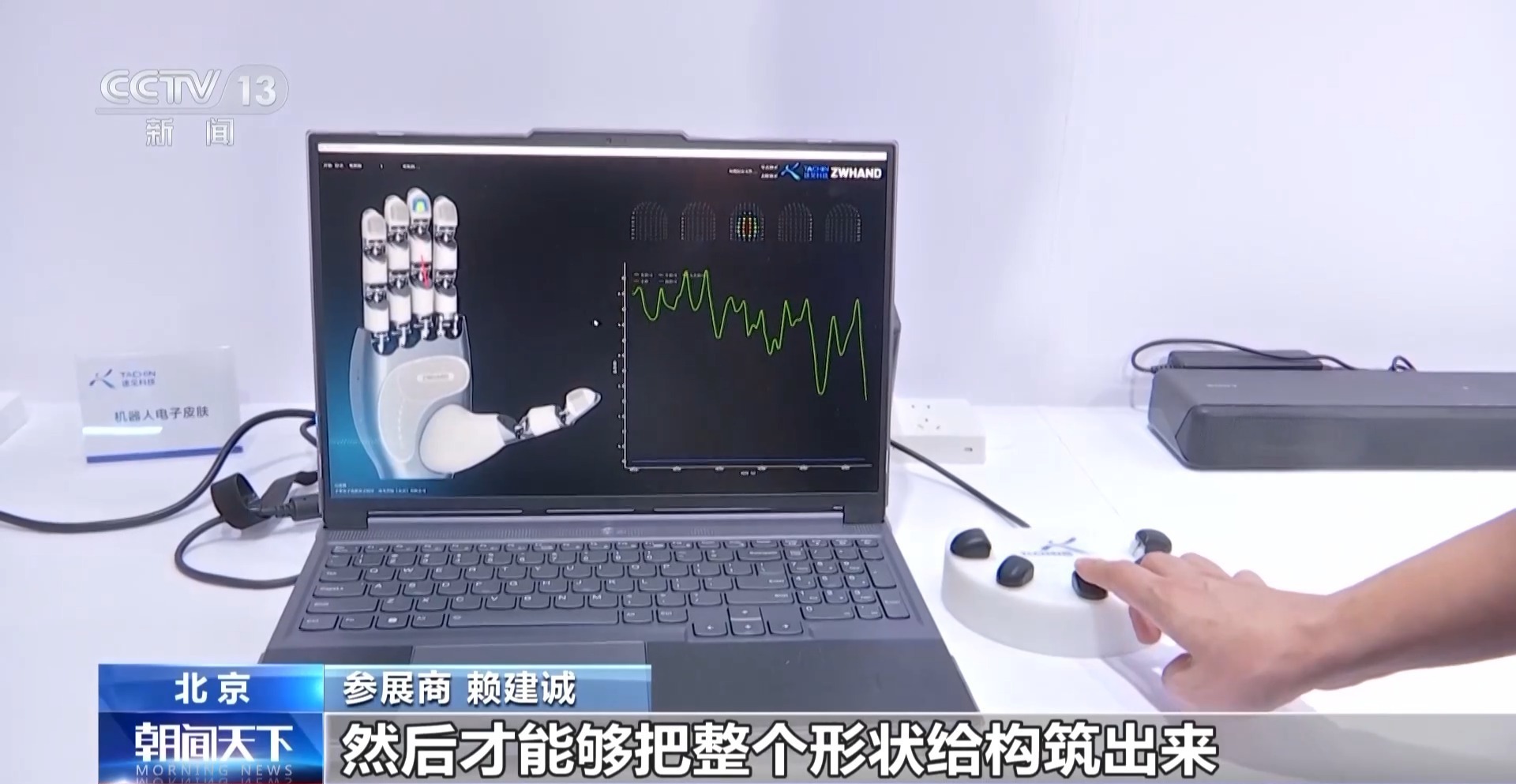
參展商 賴建誠:咱們需求在整個“靈活手”的外外表去布滿傳感器,相當于整個指紋區域都要有,這樣它能夠更好地最直接去跟榜首界面進行觸摸,而且進行辨認,然后才能夠去把整個形狀給構筑出來,這是整個觸覺里邊最困難的一部分,就是說怎么獲取實在的界面信息。

靈活手作為人形機器人最為要害的組成部分,要具有強壯的感知才能,其間最為重要的是要像人類相同具有觸覺感知和對力的操控。不同的參展商帶來了許多不同技能道路的解決方案,比方這個靈活手經過在硅膠外表內的微型攝像機,記載資梵高同性戀料極端弱小的物理形變,然后推斷出類似于觸覺的信息。
一個指尖巨細的觸覺傳感器,要能感知出一克物體的壓力,一起還要丈量和計算出它的原料、粗糙度、柔性等多維度的數據信息,因而制作工藝難度很大,這也導致機器人整只靈活手的本錢是機器人整只本錢的近20%。但在本年國際機器人大會上,記者發現,供應鏈價格發生了很大的改變。像有的指甲蓋巨細的單一傳感器,價格從動輒數千、上萬,降至百元量級。

參展商 許晉誠:咱們現在出貨量急速加大了,咱們從規劃、封裝,全部都是自己去出產,這樣的話,咱們的本錢能夠降到最低。
【責任編輯:肖夢吟】